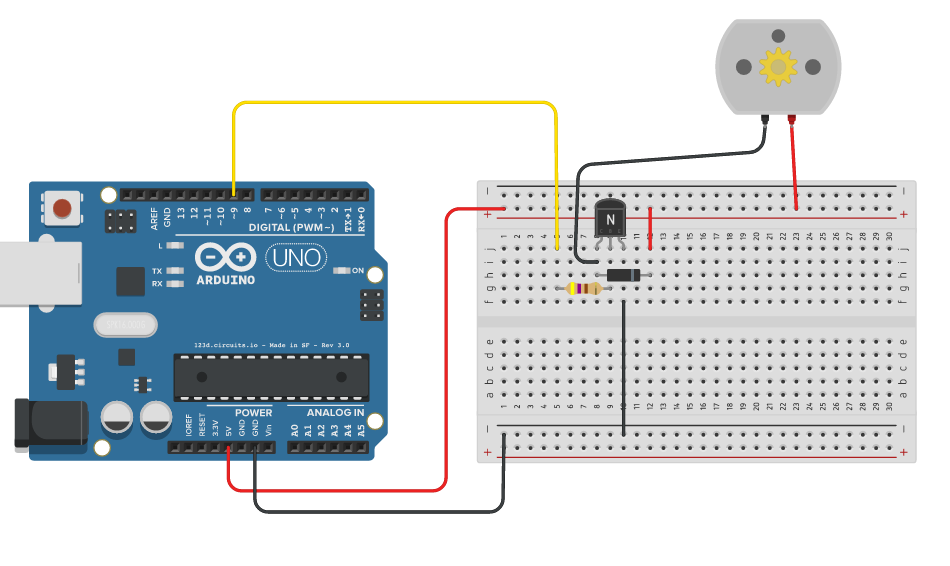
PWM Motor Code
This code makes the motor speed up until it reaches the highest speed possible and then it resets to low speed again.
------------------------
int motor = 9;
int speed = 0;
void setup() {
pinMode(motor, OUTPUT);
}
void loop() {
analogWrite(motor, speed);
speed = speed + 31;
if (speed > 250)
{
speed = 255;
}
delay(4000);
if (speed > 250)
{
speed = 0;
}
}
